|
Escuche este artículo |
Open Robotics lanzó recientemente Gazebo Harmonic, que es la octava versión de su simulador de código abierto. La compañía dijo que este es uno de los mayores lanzamientos de Gazebo hasta la fecha. Puede encontrar una lista completa de nuevas funciones. aquípero destacaremos algunos de ellos a continuación.
Una gran actualización, dijo, es que los usuarios ahora pueden escribir sus propios complementos de Gazebo en Python puro. Esto se hizo agregando enlaces de Python a gz-msgs, gz-transport y otros sistemas Gazebo para mejorar la experiencia del usuario.
Open Robotics también dijo que ahora es más fácil depurar e inspeccionar usando Gazebo CLI. La CLI ahora permite a los usuarios enumerar suscriptores y la información de su tema mediante un comando CLI. También hay una nueva funcionalidad de arrastre del mouse que permite a los usuarios aplicar de forma interactiva fuerzas y pares a enlaces en una simulación mientras se ejecuta la física.
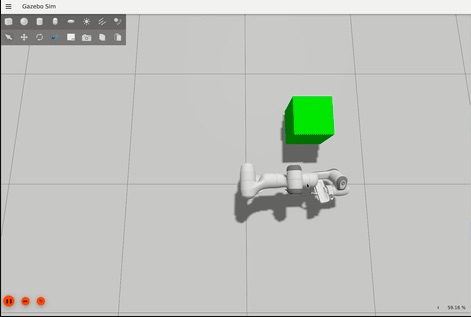
Gazebo Harmonic ahora puede calcular automáticamente momentos de inercia para archivos que usan SDFormat. Esta demostración muestra dos cilindros: uno con valores de inercia predeterminados (derecha, verde) y otro con cálculos automáticos de inercia habilitados (izquierda, amarillo). El momento de inercia (magenta) del cilindro amarillo coincide con la forma de la malla, lo que indica que los valores calculados son más realistas para los cilindros que el momento de inercia del cuadro delimitador utilizado anteriormente.

Las funciones de la cámara y la óptica se han actualizado «significativamente» para mejorar el realismo de las cámaras simuladas. Por ejemplo, los usuarios ahora pueden simular cámaras con lentes gran angular y usar matrices intrínsecas personalizadas en sus cámaras virtuales, lo que, según la compañía, facilita que las cámaras simuladas coincidan con las cámaras del mundo real. Los usuarios ahora también pueden generar datos de imágenes en formato Bayer y utilizar una profundidad de 16 bits, al igual que muchas cámaras comerciales de visión artificial.
Y para mejores simulaciones en exteriores, los usuarios ahora pueden agregar efectos ópticos personalizados en Gazebo Harmonic. Ahora puedes incluir destellos en las lentes para replicar mejor el mundo real. El simulador ahora también admite iluminación global mediante dos métodos: Voxel Cone Tracing (VCT) y Cascaded Image Voxel Cone Tracing (CIVCT). Se proporciona un complemento GUI para cada técnica de iluminación global y ofrece varios parámetros configurables, como el recuento de saltos y la resolución de vóxeles, que afectan la calidad de la escena resultante.
Finalmente, Gazebo Harmonic ha agregado funciones para los desarrolladores de sistemas de robótica marina, quienes, según la compañía, han estado usando más el simulador durante el último año. Una nueva característica es la inclusión de masa fluida adicional, que según la compañía ayuda a los robóticos marinos a tener en cuenta la cantidad de energía adicional necesaria para mover el agua alrededor de un barco al planificar cuánta energía suministrar a sus sistemas de propulsión. Y el nuevo complemento Doppler Velocity Log se puede utilizar para medir la velocidad relativa a un plano de tierra cuando el robot está en marcha.
Intrinsic, una empresa de software que surgió de la división X de Alphabet a mediados de 2021 para simplificar el uso de robots industriales, adquirió Open Source Robotics Corporation (OSRC) a finales de 2022. OSRC es la rama con fines de lucro de Open Source Robotics Foundation. que es el desarrollador del Sistema Operativo de Robot (ROS). Intrinsic también adquirió Open Source Robotics Corporation Singapore (OSRC-SG), la división de la empresa que condujo directamente al lanzamiento de Open-RMF para la interoperabilidad.
La Open Source Robotics Foundation (OSRF) sigue siendo la organización independiente sin fines de lucro que siempre ha sido. En el momento de la adquisición, OSRC dijo que esto no significaría ninguna interrupción de las actividades diarias de ROS, Gazebo, Open-RMF y toda la comunidad.