Las floraciones de algas nocivas en los lagos son un problema ambiental importante, ya que producen toxinas extremadamente peligrosas que pueden contaminar los suministros de agua o dañar otras formas de vida orgánica, incluidas las personas. Los biólogos pueden probar la seguridad del agua tomando muestras del costado de un bote, pero obtener datos relevantes no es una tarea fácil, especialmente en lagos que cubren cientos de kilómetros.
Y si bien las floraciones de algas pueden aparecer en cualquier lugar, encontrar los lugares ideales para tomar muestras es como buscar una aguja en un pajar.
Como resultado, los biólogos actualmente encuentran concentraciones de algas a través de prueba y error y luchan por anticipar un nuevo crecimiento, prolongando el descubrimiento de algas potencialmente dañinas y perdiendo tiempo y trabajo en el campo.
Ahora, científicos informáticos y biólogos de la USC han desarrollado una forma para que los robots autónomos encuentren ubicaciones privilegiadas para muestras de algas tóxicas, incluso antes de que un científico ponga un pie en el lugar. El equipo presentó recientemente el documento, titulado «Planificación de ruta informativa para estimar cuantiles para análisis ambiental», en la Conferencia internacional sobre robots y sistemas inteligentes (IROS). arXiv servidor de preimpresión
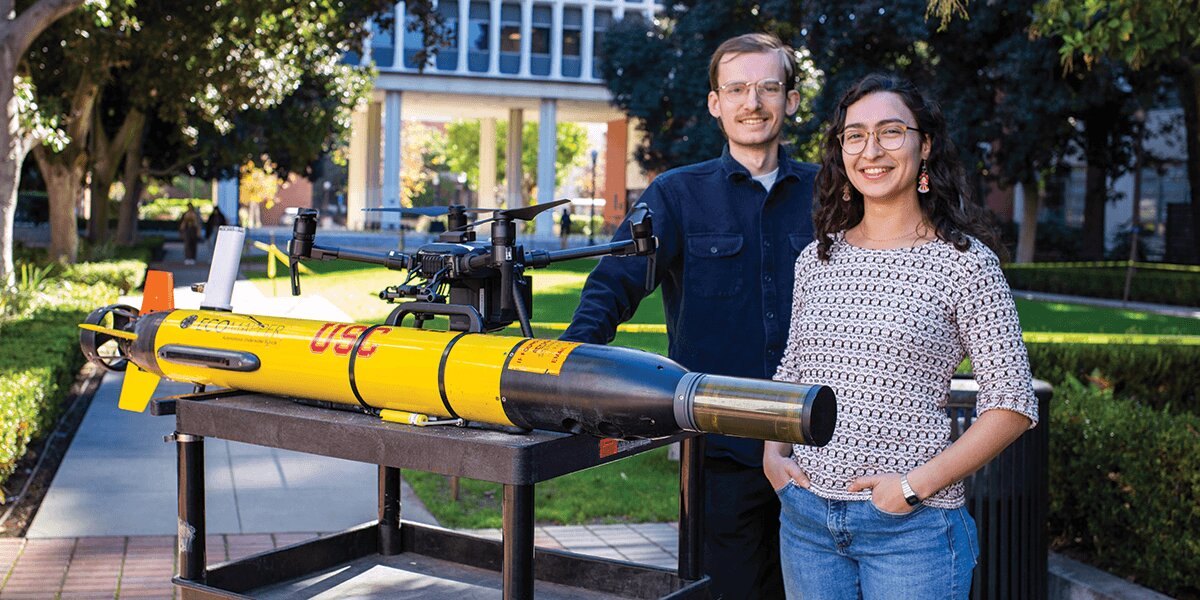
«Actualmente, muchos robots utilizados por científicos en el mundo real carecen de autonomía o adaptabilidad», dijo la coautora Isabel Rayas, Ph.D. en informática. estudiante asesorado por Gaurav Sukhatme, la Cátedra de Ciencias de la Computación y Profesor de Ciencias de la Computación e Ingeniería Eléctrica e Informática de la Fundación Fletcher Jones.
«Nuestro trabajo facilita que los biólogos indiquen de qué tipo de áreas les gustaría recolectar agua, y el robot puede enfocarse explícitamente en tomar medidas con ese objetivo en mente. Esto les permite ahorrar tiempo y recolectar datos de manera más eficiente».
Ubicación de algas nocivas
California no es ajena a la proliferación de algas nocivas, especialmente en los últimos años, ya que el cambio climático hace que las temperaturas se disparen e interrumpan los sistemas de agua. Los lagos, embalses y otros cuerpos de agua se han saturado con cianobacterias que pueden causar la proliferación de algas tóxicas, hasta el punto de que quienes viven cerca enfrentan complicaciones de salud por la ingestión de gases tóxicos.
Es muy difícil luchar contra las flores una vez que están en pleno efecto. En algunos casos, los productos químicos utilizados para tratar el agua pueden incluso empeorar el problema. Es por eso que la capacidad de los biólogos para controlar los niveles de cianobacterias es una tarea extremadamente importante.
Si bien los robots se han utilizado antes para ayudar a los biólogos a localizar algas, solo han podido proporcionar una descripción general del medio ambiente. Según el coautor del estudio, Chris Denniston, Ph.D. en informática. estudiante, el proceso también adolece de un «problema del huevo y la gallina».
«Realmente no sabes lo que vas a obtener al tomar muestras del agua, y es difícil elegir dónde tomar muestras porque no hay datos previos», dijo Denniston. «Es difícil saber qué ubicaciones son las mejores para medir sin medirlas primero».
Pon tus ojos en un área
En cambio, los robots del equipo de la USC actúan como una «inspección previa» para colocar los ojos en un área antes de que los biólogos salgan al campo. Si bien los biólogos han usado drones en este proceso antes, el equipo de la USC es el primero en incorporar la planificación para este tipo específico de tarea en la rutina de los robots, donde buscará activamente rastros de floraciones de algas mientras explora el lago, según el biólogos. . ‘ preferencia.
Por ejemplo, podrían simplemente pedirle al robot que busque ubicaciones que cumplan con un cierto «cuantil de interés» o, en este caso, puntos verdes que marcan las concentraciones de clorofila. Usando una cámara en un dron o un sensor de clorofila en vehículos submarinos, esta nueva investigación se enfoca en cómo el algoritmo puede seleccionar ubicaciones de manera inteligente para medir las concentraciones de algas tóxicas, según la información recopilada.
Ahora, en lugar de simplemente proporcionar a los científicos un mapa más detallado de un área y explorarla indiscriminadamente, los robots pueden concentrarse en los sitios de muestreo óptimos y eliminar la necesidad de que los biólogos hagan múltiples viajes al lago solo para averiguar dónde podrían estar las aguas. algas marinas .
El modelo del proyecto es «más inteligente» que los dispositivos típicos que usan los biólogos porque mantiene un modelo de su entorno mediante la planificación de rutas informativas, o IPP, un tipo de inteligencia artificial que determina la ruta más eficiente para que un sistema autónomo logre su objetivo.
Con IPP, la ruta óptima para que el robot busque algas se actualiza constantemente, en función de la información que obtiene de sus sensores, lo que le permite «volar» a dónde ir, en función de lo que ya ha visto.
Cada vez que el dron se mueve, toma nuevas medidas para actualizar progresivamente un modelo interno que le indica a dónde ir a continuación. El resultado es un mapa que muestra claramente las áreas donde las concentraciones de algas estarían particularmente cerca de los cuantiles, o niveles, que interesarían a los biólogos. En otras palabras: el lugar ideal para tomar muestras.
Los investigadores probaron la capacidad del sistema para detectar «manchas verdes» de algas cuando volaba el dron por un campo.
“El beneficio de usar robots es que nos estamos enfocando en recopilar datos específicamente para los tipos de sitios en los que estos científicos están interesados”, dijo Rayas, y agregó que están expandiendo el sistema para trabajar con equipos de robots para mayor eficiencia. «Se necesita un poco de conjetura y da una razón más fundamentada para elegir ciertos lugares».
El coautor del estudio, el profesor David Caron, capitán de USC Associates, presidente Allan Hancock de ciencias marinas y profesor de ciencias biológicas, ha trabajado con Sukhatme en investigaciones que combinan biología e informática durante más de 15 años.
«Como biólogo, quiero saber más sobre lo que sucede en el agua», dijo Caron. «Cualquier cosa que la robótica y la informática puedan hacer para darme una idea, ojos adicionales en el agua, por así decirlo, es muy valioso para mí».
Según Caron, evaluar las masas de agua requiere mucho trabajo y cualquier cosa que ahorre tiempo o esfuerzo será útil.
«Si quiero decir algo sobre un cuerpo de agua, tengo que subirme a un bote, tengo que ir allí en un entorno enorme, y tengo que poner instrumentos en el agua y recogerlos», dijo Caron. «Simplemente no hay suficiente información de algo como los sensores para poder hacer todas las mediciones que me gustaría».
Sukhatme atestiguó que los biólogos no son los únicos que obtienen los beneficios, ya que abordar problemas de otras áreas podría cambiar la forma en que los científicos informáticos abordan los problemas.
«Los grandes problemas no encajan perfectamente dentro de los límites disciplinarios: hay que pensar fuera de la caja. Para mí, como científico informático y robótico, colaborar con el grupo del profesor Caron ha sido una educación», dijo Sukhatme. «Aprendimos a plantear los problemas de nuevas maneras, lo que lleva a soluciones que nunca antes se hubieran dado».
Tanto Denniston como Rayas valoran trabajar con biólogos porque les brinda la oportunidad de abordar problemas ambientales utilizando la informática. Creen que su modelo de planificación de rutas informativas se puede aplicar a otros tipos de levantamientos topográficos en el futuro.
«Creo que es genial que tengamos esta colaboración con el laboratorio de biología, y nos da una base de por qué estamos haciendo lo que estamos haciendo y que es de interés humano», dijo Rayas. «Empecé a trabajar en esto porque estaba buscando una forma de que la robótica tuviera un impacto positivo en el medio ambiente».
Mas informaciones:
Isabel M. Rayas Fernández et al, Planificación de rutas informativas para estimar cuantiles para análisis ambiental, arXiv (2022). DOI: 10.48550/arxiv.2201.10633