
× cerrar
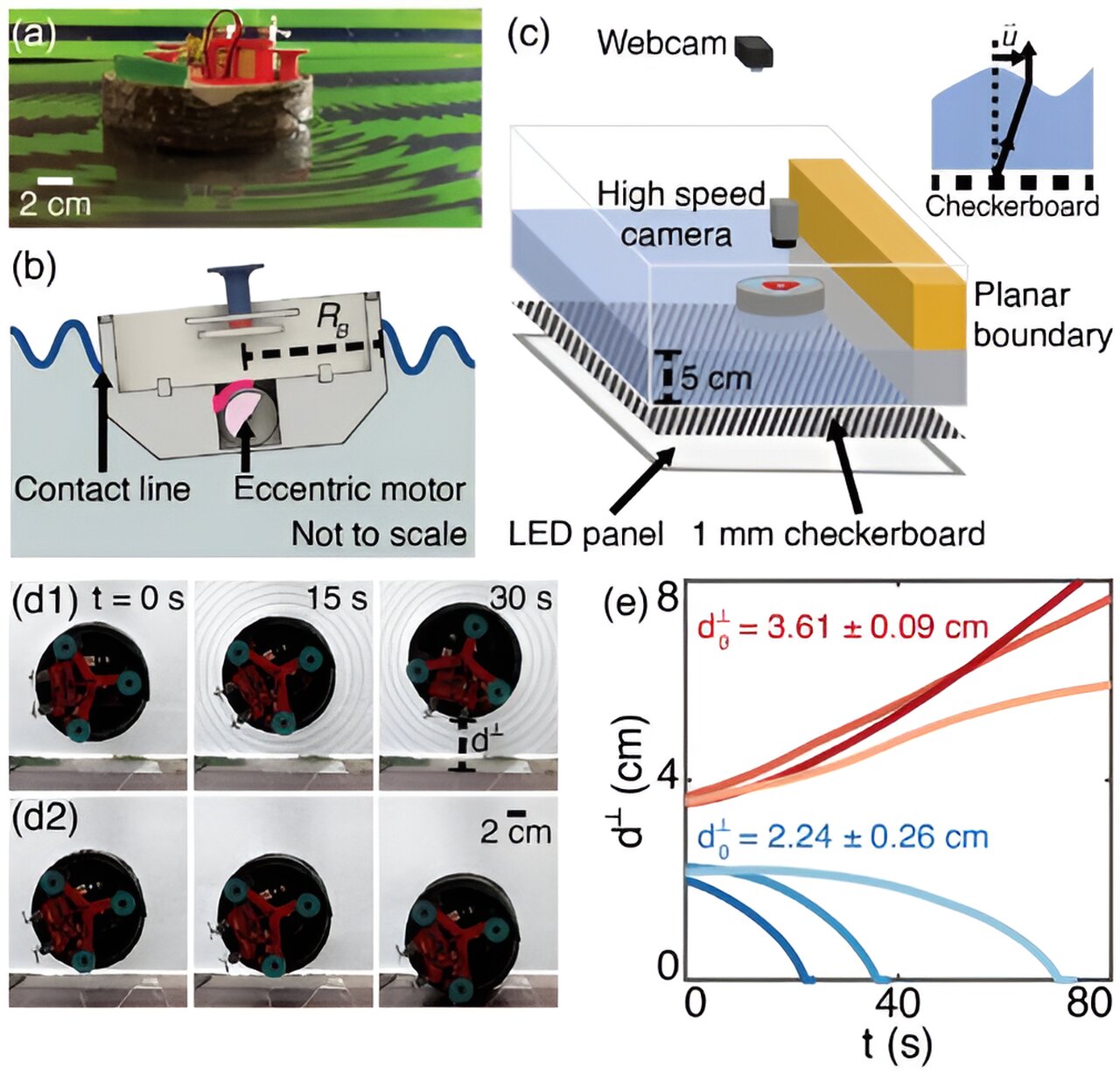
Barco robot generador de olas. (a) Foto de un barco que genera olas de 17,1 Hz. (b) Esquema del motor excéntrico que hace vibrar el barco para generar olas; las hélices que se muestran en (a) no se utilizan en este estudio y, por lo tanto, se omiten en (b). (c) Diagrama del tanque donde se llevaron a cabo todos los experimentos. Un tablero de ajedrez retroiluminado permite una rápida demodulación del tablero para la reconstrucción de la superficie espaciotemporal. (Recuadro) La demodulación rápida del tablero de ajedrez determina la altura de la superficie del fluido utilizando la distorsión instantánea de un tablero de ajedrez por perturbaciones de la superficie. (d1) – (d2) Serie temporal de repulsión (17,1 Hz) y atracción hacia la pared (33,5 Hz), respectivamente. (e) Evolución de la distancia perpendicular casco-pared para pruebas repetidas de atracción y repulsión a 17,1 Hz y dos distancias iniciales diferentes. Crédito: Cartas de revisión física (2024). DOI: 10.1103/PhysRevLett.132.084001
Pueden suceder cosas extrañas cuando una ola alcanza un límite. En el océano, las olas de un tsunami que apenas se notan en aguas profundas pueden llegar a ser bastante grandes en la plataforma continental y la costa a medida que las olas disminuyen su velocidad y su masa asciende.
El efecto Casimir es la atracción de dos placas paralelas y descargadas porque entre ellas se excluyen las ondas virtuales de la mecánica cuántica con longitudes de onda más largas que la separación de las placas, de modo que los campos virtuales fuera de las placas las empujan hacia adentro. Placas paralelas parcialmente sumergidas en agua. atraerse unos a otros ya que las ondas de agua portadoras de impulso de longitud de onda más larga están excluidas de la región central. (Las especulaciones sobre un efecto Casimir marítimo entre barcos atracados son todavía bajo debate.)
Ahora, los científicos han demostrado que un robot oscilante y flotante simétrico experimentará fuerzas a medida que se acerque a un límite. Estas fuerzas se pueden utilizar para la autopropulsión sin necesidad de mecanismos más típicos como una hélice.
El estudio es Publicado en el diario Cartas de revisión física.
Dirigido por el estudiante de doctorado Steven W. Tarr del Instituto de Tecnología de Georgia, el equipo construyó un flotador circular impreso en 3D que medía 12 cm de diámetro y pesaba 368 g. A bordo, instalaron motores alimentados por baterías que hacen vibrar el barco con una frecuencia controlable, produciendo un movimiento vibratorio a lo largo del eje longitudinal (de cojinete). Cuando se encendía, la nave producía una serie de ondas simétricas en la superficie del agua, todas con la misma longitud de onda, que irradiaban desde ella.
Se colocó una lámina de acrílico cerca del agua para que actuara como límite, lo suficientemente larga como para crear efectivamente un sistema unidimensional, de modo que solo fuera necesario monitorear el movimiento del barco perpendicular a la pared. Lejos de la pared (en relación con el tamaño del barco y las longitudes de onda de las olas del agua), no había fuerza neta sobre el barco. Pero cerca de la pared, se observó que el barco generador de olas experimentaba un comportamiento atractivo o repulsivo, dependiendo de la distancia inicial de la pared y la frecuencia de las ondas de agua generadas.
Los investigadores utilizaron una cámara web para registrar el movimiento del barco y midieron su movimiento lateral (perpendicular a la pared), al mismo tiempo que midieron su aceleración en esta dirección perpendicular (que era menos de 100 micrómetros por segundo al cuadrado). Las olas que emanaban del barco oscilante fueron visualizadas y medidas con una cámara de alta velocidad a través de la fotografía Schlieren, que mide los cambios en el caudal de un fluido observando cambios en su índice de refracción.
Cuando comenzó cerca de la pared (aproximadamente la mitad de su radio o menos), el barco se sintió cada vez más atraído por la pared a medida que su distancia inicial disminuía y su frecuencia de oscilación aumentaba (y por lo tanto también lo hacía la frecuencia de las olas del agua). A una distancia media, a una distancia inicial de aproximadamente dos tercios del radio y a frecuencias más bajas, la fuerza sobre el barco se volvió ligeramente repulsiva, alejándolo de la pared. A grandes distancias (en relación con el radio), no había fuerza neta sobre el barco.
Debido a que la aceleración era muy pequeña, menos de 10 millonésimas de la aceleración gravitacional de la superficie terrestre («g»), se tomaron medidas para aislar las fuerzas de los efectos a corto plazo de la viscosidad, la resistencia del barco debido a las olas. ellos mismos y la inercia del barco. Aún así, las fuerzas eran pequeñas, por debajo de los 100 micronewtons.
El fenómeno locomotor de la fuerza autopropagante y resultante de las olas que emanaban del barco se produjo cuando las ondas reflejadas en la pared golpearon el casco del barco con suficiente energía. En la pared lateral del barco, las olas reflejadas golpean el casco con una altura de ola (amplitud) menor que la que dejaron, debido a la dispersión de las olas a medida que viajan por la superficie del agua. Estas ondas de retorno más pequeñas se restaron de las ondas más grandes emitidas, interfiriendo y disminuyendo efectivamente la amplitud de las ondas que emitía el barco en el costado de la pared.
Mas informaciones:
Steven W. Tarr et al, Fuerzas de sondeo inducidas por flotabilidad hidrodinámica con un robot oscilante, Cartas de revisión física (2024). DOI: 10.1103/PhysRevLett.132.084001
© 2024 Red Ciencia X



