![Brazo robótico europeo (ERA) listo para la estación espacial [Video]](https://scitechdaily.com/images/European-Robotic-Arm.jpg "Brazo robótico europeo (ERA) listo para la estación espacial [Video]")
El brazo robótico europeo (ERA) se lanzará en la Estación Espacial Internacional junto con el módulo de laboratorio multiusos ruso, llamado ‘Nauka’. ERA es el primer robot capaz de «caminar» por el segmento ruso de la Estación Espacial. Tiene la capacidad de anclarse a la estación y moverse de un lado a otro por su cuenta, con las manos entre puntos de base fijos. Este robot espacial inteligente de 11 metros servirá como manipulador principal en la parte rusa de la Estación Espacial, ayudando a los astronautas durante las caminatas espaciales. El brazo robótico puede ayudar a instalar, desplegar y reemplazar elementos en el espacio exterior.
ERA está 100% fabricado en Europa. Un consorcio de empresas europeas liderado por Airbus Defence y Space Netherlands diseñado y ensamblado para la ESA. El brazo robótico está financiado en gran parte por el gobierno holandés.
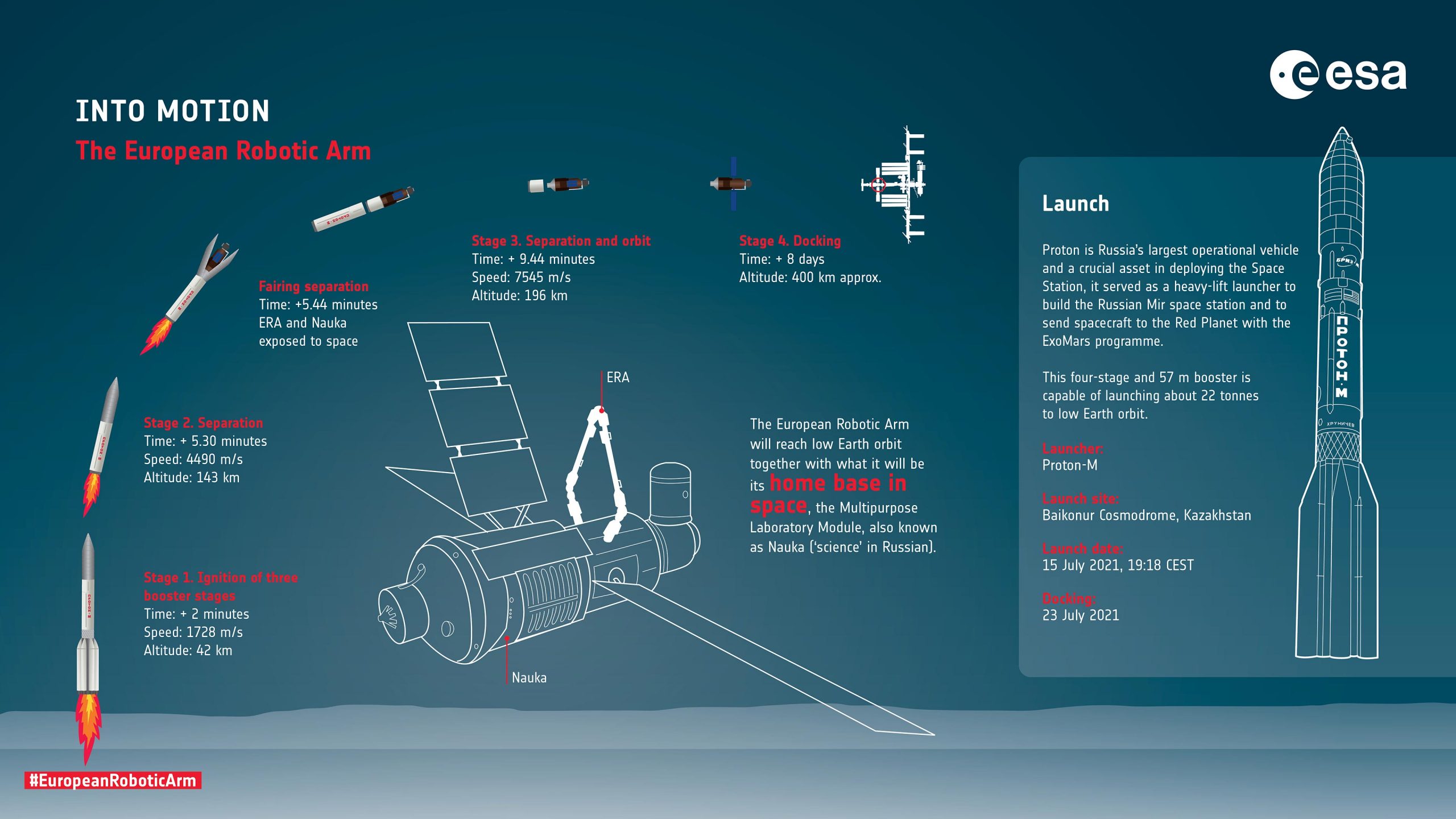
Infografía con la secuencia de lanzamiento y detalles del lanzador del Brazo Robótico Europeo. Crédito: ESA
El brazo robótico europeo es el primer robot que puede «caminar» alrededor de la parte rusa de la Estación Espacial Internacional.
El ERA tiene una longitud de más de 11 my puede anclar a la estación en varios lugares, moviéndose hacia adelante y hacia atrás alrededor del segmento ruso con un amplio rango de movimiento. Su base principal será el Módulo de Laboratorio Polivalente, también llamado ‘Nauka’.
Los astronautas encontrarán en el brazo robótico europeo un aliado muy valioso: les ahorrará un tiempo precioso para hacer otros trabajos en el espacio.
La tripulación espacial puede controlar la ERA desde dentro y fuera de la Estación Espacial, una característica que ningún otro brazo robótico ha ofrecido antes.
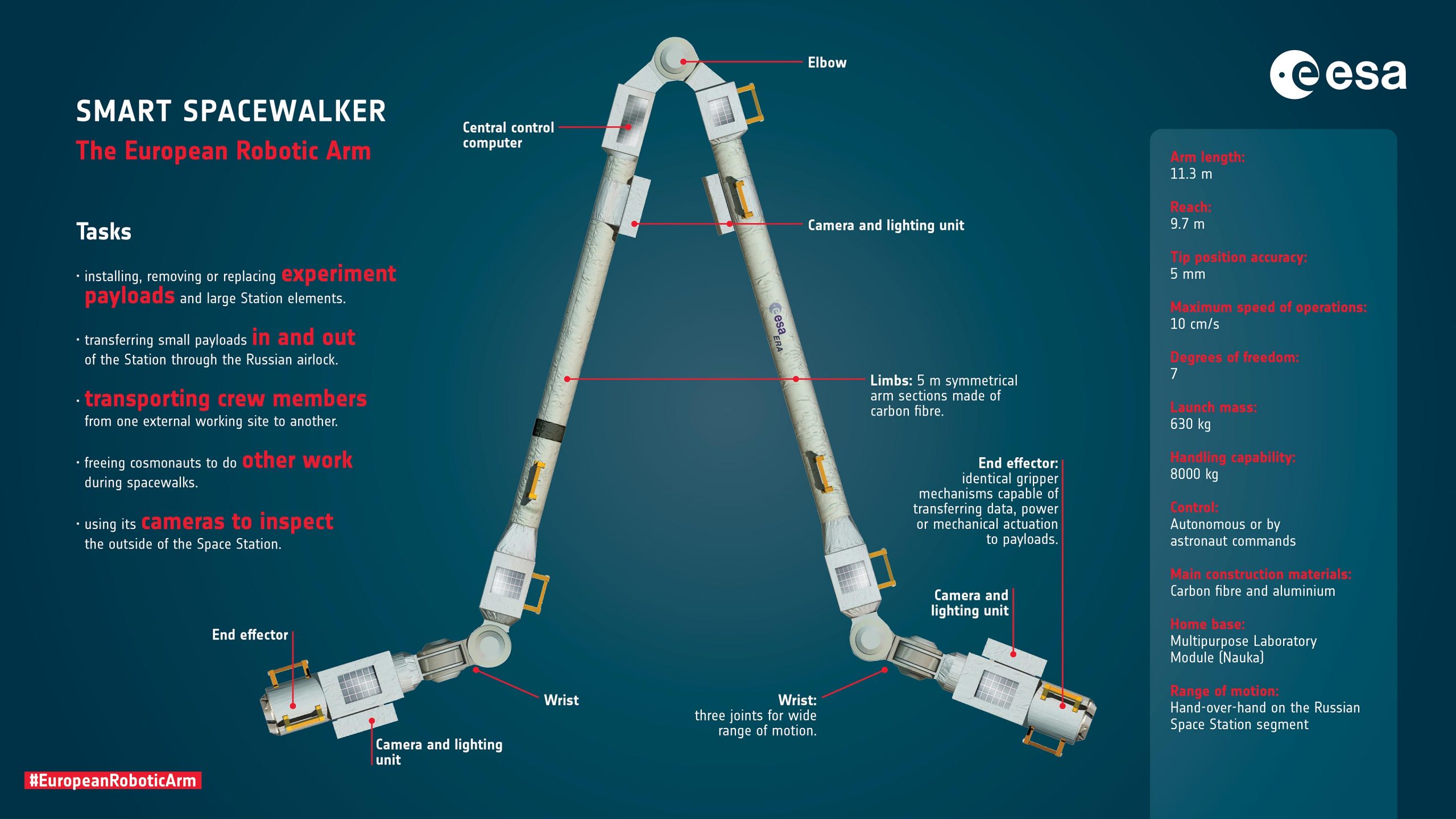
Smart Spacewalker: Las especificaciones europeas del brazo robótico. Crédito: ESA
100% fabricado en Europa, este brazo robótico inteligente consta de dos efectores finales, dos muñecas, dos extremidades y una articulación del codo junto con componentes electrónicos y cámaras. Ambos extremos actúan como una «mano» para el robot.




